


入门全分片数据并行(FSDP)#
作者: Hamid Shojanazeri, Yanli Zhao, Shen Li
注意
FSDP1 已弃用。请查看 FSDP2 教程。
大规模训练 AI 模型是一项艰巨的任务,需要大量的计算能力和资源。处理这些非常大的模型的训练也带来了相当大的工程复杂性。PyTorch 1.11 中发布的 PyTorch FSDP 使这项工作变得更加容易。
在本教程中,我们将演示如何使用 FSDP API 来处理简单的 MNIST 模型,这些模型可以扩展到其他更大的模型,例如 HuggingFace BERT 模型、高达 1T 参数的 GPT 3 模型。DDP MNIST 示例代码由 Patrick Hu 提供。
FSDP 如何工作#
在 DistributedDataParallel (DDP) 训练中,每个进程/工作节点都拥有一个模型副本,并处理一批数据,最后使用 all-reduce 操作在不同工作节点之间汇总梯度。在 DDP 中,模型权重和优化器状态会复制到所有工作节点。FSDP 是一种数据并行方法,它将模型参数、优化器状态和梯度分片到 DDP 进程中。
使用 FSDP 进行训练时,与所有工作节点上的 DDP 训练相比,GPU 内存占用更小。这使得一些非常大的模型的训练成为可能,因为它允许更大的模型或批次大小能够容纳到设备中。这样做是以增加通信量为代价的。通过诸如通信与计算重叠之类的内部优化来减少通信开销。
FSDP 工作流程#
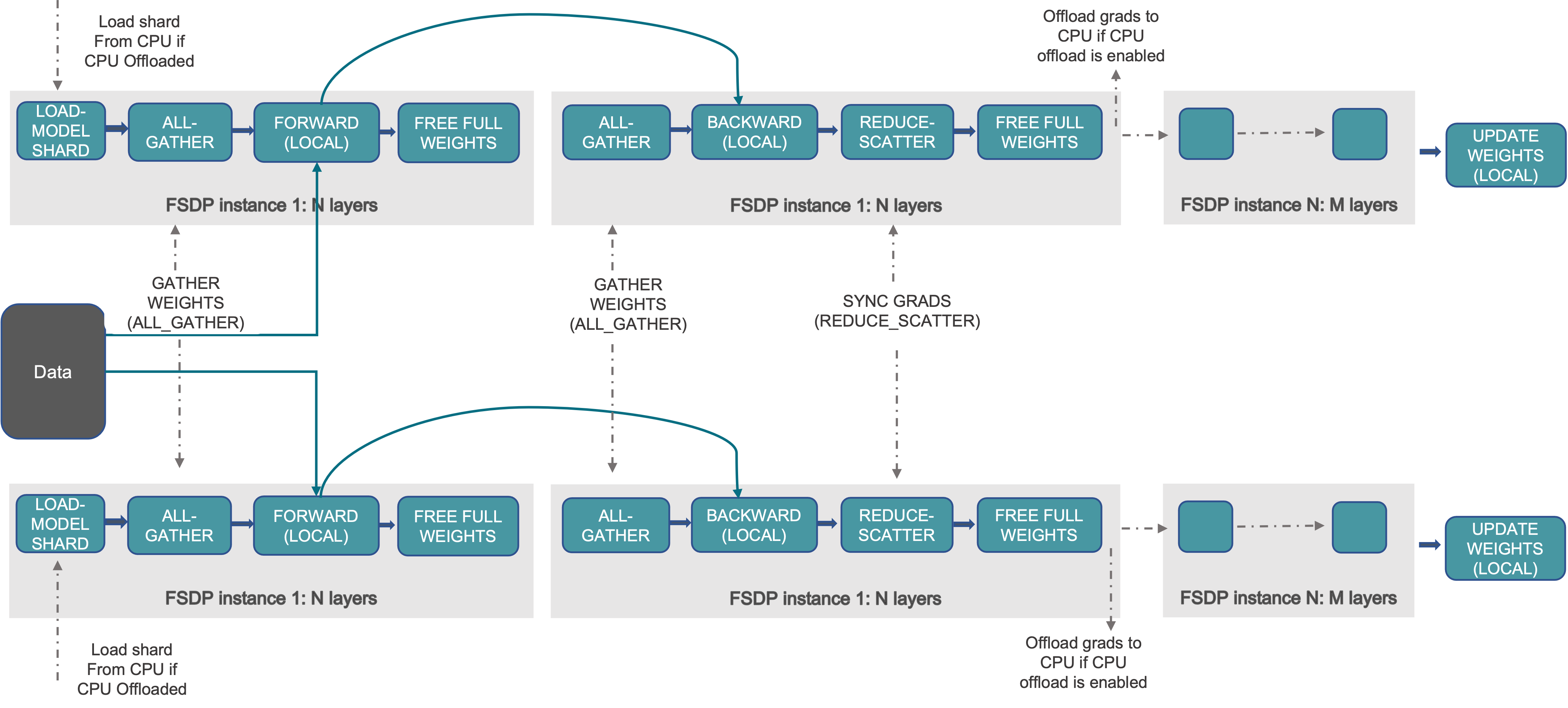
FSDP 的工作流程大致如下:
在构造函数中
对模型参数进行分片,每个进程只保留自己的分片
在前向传播中
运行 all_gather 以收集来自所有进程的分片,以恢复此 FSDP 单元的完整参数
运行前向计算
丢弃刚刚收集的参数分片
在反向传播中
运行 all_gather 以收集来自所有进程的分片,以恢复此 FSDP 单元的完整参数
运行反向计算
运行 reduce_scatter 以同步梯度
丢弃参数。
理解 FSDP 分片的一种方法是将 DDP 的梯度 all-reduce 分解为 reduce-scatter 和 all-gather。具体来说,在反向传播过程中,FSDP 会对梯度进行 reduce-scatter 操作,确保每个进程拥有梯度的一个分片。然后,在优化器步骤中更新相应的参数分片。最后,在随后的前向传播中,它执行 all-gather 操作来收集和组合更新后的参数分片。
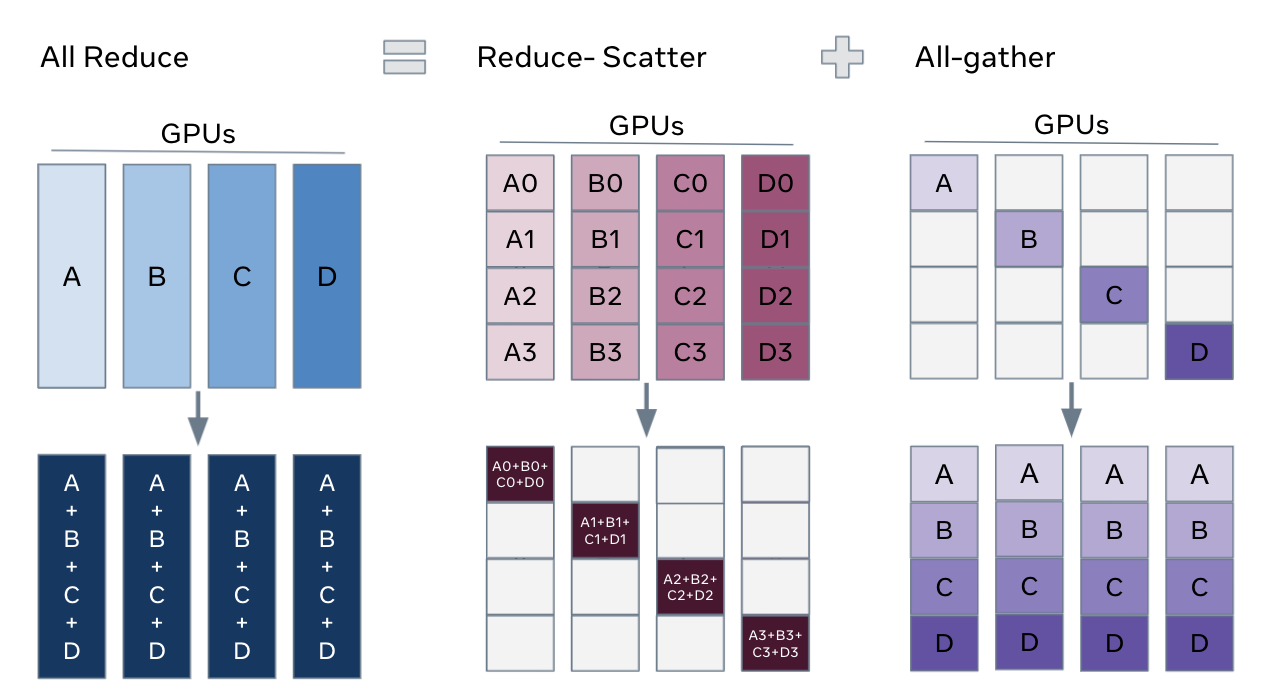
FSDP Allreduce#
如何使用 FSDP#
在这里,我们使用一个玩具模型来演示在 MNIST 数据集上进行训练。这些 API 和逻辑也可以应用于训练更大的模型。
设置
1.1 安装 PyTorch 和 Torchvision
有关安装信息,请参阅 入门指南。
我们将以下代码片段添加到 Python 脚本“FSDP_mnist.py”中。
1.2 导入必要的包
注意
本教程适用于 PyTorch 1.12 及更高版本。如果您使用的是早期版本,请将所有 size_based_auto_wrap_policy 实例替换为 default_auto_wrap_policy,并将 fsdp_auto_wrap_policy 替换为 auto_wrap_policy。
# Based on: https://github.com/pytorch/examples/blob/master/mnist/main.py
import os
import argparse
import functools
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from torch.optim.lr_scheduler import StepLR
import torch.distributed as dist
import torch.multiprocessing as mp
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.utils.data.distributed import DistributedSampler
from torch.distributed.fsdp import FullyShardedDataParallel as FSDP
from torch.distributed.fsdp.fully_sharded_data_parallel import (
CPUOffload,
BackwardPrefetch,
)
from torch.distributed.fsdp.wrap import (
size_based_auto_wrap_policy,
enable_wrap,
wrap,
)
1.3 分布式训练设置。正如我们之前提到的,FSDP 是一种数据并行方法,需要分布式训练环境,因此我们使用两个辅助函数来初始化分布式训练进程并进行清理。
def setup(rank, world_size):
os.environ['MASTER_ADDR'] = 'localhost'
os.environ['MASTER_PORT'] = '12355'
# initialize the process group
dist.init_process_group("nccl", rank=rank, world_size=world_size)
def cleanup():
dist.destroy_process_group()
2.1 定义我们的玩具模型用于手写数字分类。
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 32, 3, 1)
self.conv2 = nn.Conv2d(32, 64, 3, 1)
self.dropout1 = nn.Dropout(0.25)
self.dropout2 = nn.Dropout(0.5)
self.fc1 = nn.Linear(9216, 128)
self.fc2 = nn.Linear(128, 10)
def forward(self, x):
x = self.conv1(x)
x = F.relu(x)
x = self.conv2(x)
x = F.relu(x)
x = F.max_pool2d(x, 2)
x = self.dropout1(x)
x = torch.flatten(x, 1)
x = self.fc1(x)
x = F.relu(x)
x = self.dropout2(x)
x = self.fc2(x)
output = F.log_softmax(x, dim=1)
return output
2.2 定义一个训练函数
def train(args, model, rank, world_size, train_loader, optimizer, epoch, sampler=None):
model.train()
ddp_loss = torch.zeros(2).to(rank)
if sampler:
sampler.set_epoch(epoch)
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(rank), target.to(rank)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target, reduction='sum')
loss.backward()
optimizer.step()
ddp_loss[0] += loss.item()
ddp_loss[1] += len(data)
dist.all_reduce(ddp_loss, op=dist.ReduceOp.SUM)
if rank == 0:
print('Train Epoch: {} \tLoss: {:.6f}'.format(epoch, ddp_loss[0] / ddp_loss[1]))
2.3 定义一个验证函数
def test(model, rank, world_size, test_loader):
model.eval()
correct = 0
ddp_loss = torch.zeros(3).to(rank)
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(rank), target.to(rank)
output = model(data)
ddp_loss[0] += F.nll_loss(output, target, reduction='sum').item() # sum up batch loss
pred = output.argmax(dim=1, keepdim=True) # get the index of the max log-probability
ddp_loss[1] += pred.eq(target.view_as(pred)).sum().item()
ddp_loss[2] += len(data)
dist.all_reduce(ddp_loss, op=dist.ReduceOp.SUM)
if rank == 0:
test_loss = ddp_loss[0] / ddp_loss[2]
print('Test set: Average loss: {:.4f}, Accuracy: {}/{} ({:.2f}%)\n'.format(
test_loss, int(ddp_loss[1]), int(ddp_loss[2]),
100. * ddp_loss[1] / ddp_loss[2]))
2.4 定义一个包装模型为 FSDP 的分布式训练函数
注意:要保存 FSDP 模型,我们需要在每个进程上调用 state_dict,然后在 Rank 0 上保存整体状态。
def fsdp_main(rank, world_size, args):
setup(rank, world_size)
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
dataset1 = datasets.MNIST('../data', train=True, download=True,
transform=transform)
dataset2 = datasets.MNIST('../data', train=False,
transform=transform)
sampler1 = DistributedSampler(dataset1, rank=rank, num_replicas=world_size, shuffle=True)
sampler2 = DistributedSampler(dataset2, rank=rank, num_replicas=world_size)
train_kwargs = {'batch_size': args.batch_size, 'sampler': sampler1}
test_kwargs = {'batch_size': args.test_batch_size, 'sampler': sampler2}
cuda_kwargs = {'num_workers': 2,
'pin_memory': True,
'shuffle': False}
train_kwargs.update(cuda_kwargs)
test_kwargs.update(cuda_kwargs)
train_loader = torch.utils.data.DataLoader(dataset1,**train_kwargs)
test_loader = torch.utils.data.DataLoader(dataset2, **test_kwargs)
my_auto_wrap_policy = functools.partial(
size_based_auto_wrap_policy, min_num_params=100
)
torch.cuda.set_device(rank)
init_start_event = torch.cuda.Event(enable_timing=True)
init_end_event = torch.cuda.Event(enable_timing=True)
model = Net().to(rank)
model = FSDP(model)
optimizer = optim.Adadelta(model.parameters(), lr=args.lr)
scheduler = StepLR(optimizer, step_size=1, gamma=args.gamma)
init_start_event.record()
for epoch in range(1, args.epochs + 1):
train(args, model, rank, world_size, train_loader, optimizer, epoch, sampler=sampler1)
test(model, rank, world_size, test_loader)
scheduler.step()
init_end_event.record()
if rank == 0:
init_end_event.synchronize()
print(f"CUDA event elapsed time: {init_start_event.elapsed_time(init_end_event) / 1000}sec")
print(f"{model}")
if args.save_model:
# use a barrier to make sure training is done on all ranks
dist.barrier()
states = model.state_dict()
if rank == 0:
torch.save(states, "mnist_cnn.pt")
cleanup()
2.5 最后,解析参数并设置主函数
if __name__ == '__main__':
# Training settings
parser = argparse.ArgumentParser(description='PyTorch MNIST Example')
parser.add_argument('--batch-size', type=int, default=64, metavar='N',
help='input batch size for training (default: 64)')
parser.add_argument('--test-batch-size', type=int, default=1000, metavar='N',
help='input batch size for testing (default: 1000)')
parser.add_argument('--epochs', type=int, default=10, metavar='N',
help='number of epochs to train (default: 14)')
parser.add_argument('--lr', type=float, default=1.0, metavar='LR',
help='learning rate (default: 1.0)')
parser.add_argument('--gamma', type=float, default=0.7, metavar='M',
help='Learning rate step gamma (default: 0.7)')
parser.add_argument('--no-cuda', action='store_true', default=False,
help='disables CUDA training')
parser.add_argument('--seed', type=int, default=1, metavar='S',
help='random seed (default: 1)')
parser.add_argument('--save-model', action='store_true', default=False,
help='For Saving the current Model')
args = parser.parse_args()
torch.manual_seed(args.seed)
WORLD_SIZE = torch.cuda.device_count()
mp.spawn(fsdp_main,
args=(WORLD_SIZE, args),
nprocs=WORLD_SIZE,
join=True)
我们记录了 CUDA 事件以测量 FSDP 模型特定部分的耗时。CUDA 事件耗时为 110.85 秒。
python FSDP_mnist.py
CUDA event elapsed time on training loop 40.67462890625sec
通过使用 FSDP 包装模型,模型将如下所示,我们可以看到模型已被包装在一个 FSDP 单元中。或者,我们将在接下来的内容中介绍添加 auto_wrap_policy,并讨论其差异。
FullyShardedDataParallel(
(_fsdp_wrapped_module): FlattenParamsWrapper(
(_fpw_module): Net(
(conv1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(dropout1): Dropout(p=0.25, inplace=False)
(dropout2): Dropout(p=0.5, inplace=False)
(fc1): Linear(in_features=9216, out_features=128, bias=True)
(fc2): Linear(in_features=128, out_features=10, bias=True)
)
)
)
以下是 FSDP MNIST 训练在 g4dn.12.xlarge AWS EC2 实例上(使用 4 个 GPU)的峰值内存使用情况,通过 PyTorch Profiler 捕获。
FSDP 峰值内存使用情况#
应用 FSDP 的auto_wrap_policy,否则 FSDP 会将整个模型放在一个 FSDP 单元中,这将降低计算效率和内存效率。其工作原理是,假设您的模型包含 100 个 Linear 层。如果您执行 FSDP(model),则只有一个 FSDP 单元包装整个模型。在这种情况下,allgather 将收集所有 100 个线性层的完整参数,因此不会节省用于参数分片的 CUDA 内存。此外,对于所有 100 个线性层只有一个阻塞的 allgather 调用,层之间不会发生通信与计算重叠。
为避免这种情况,您可以传递一个 auto_wrap_policy,它会在满足指定条件时(例如,大小限制)自动封存当前的 FSDP 单元并启动一个新的。这样您将拥有多个 FSDP 单元,并且一次只有一个 FSDP 单元需要收集完整参数。例如,假设您有 5 个 FSDP 单元,每个单元包装 20 个线性层。那么,在前向传播中,第一个 FSDP 单元将 allgather 前 20 个线性层的参数,进行计算,丢弃参数,然后处理接下来的 20 个线性层。因此,在任何给定时间点,每个进程只实例化 20 个线性层的参数/梯度,而不是 100 个。
要在 2.4 中实现这一点,我们定义 auto_wrap_policy 并将其传递给 FSDP 包装器。在以下示例中,my_auto_wrap_policy 定义了一个层,如果该层的参数数量大于 100,则该层可以被 FSDP 包装或分片。如果该层的参数数量小于 100,它将与其他小型层一起被 FSDP 包装。寻找最优的 auto wrap policy 具有挑战性,PyTorch 将在未来添加对该配置的自动调整。没有自动调整工具,最好通过实验性地使用不同的 auto wrap policies 来剖析您的工作流程并找到最优策略。
my_auto_wrap_policy = functools.partial(
size_based_auto_wrap_policy, min_num_params=20000
)
torch.cuda.set_device(rank)
model = Net().to(rank)
model = FSDP(model,
auto_wrap_policy=my_auto_wrap_policy)
应用 auto_wrap_policy 后,模型将如下所示
FullyShardedDataParallel(
(_fsdp_wrapped_module): FlattenParamsWrapper(
(_fpw_module): Net(
(conv1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(dropout1): Dropout(p=0.25, inplace=False)
(dropout2): Dropout(p=0.5, inplace=False)
(fc1): FullyShardedDataParallel(
(_fsdp_wrapped_module): FlattenParamsWrapper(
(_fpw_module): Linear(in_features=9216, out_features=128, bias=True)
)
)
(fc2): Linear(in_features=128, out_features=10, bias=True)
)
)
python FSDP_mnist.py
CUDA event elapsed time on training loop 41.89130859375sec
以下是使用 auto_wrap policy 的 FSDP MNIST 训练在 g4dn.12.xlarge AWS EC2 实例上(使用 4 个 GPU)的峰值内存使用情况,通过 PyTorch Profiler 捕获。可以观察到,与未使用 auto wrap policy 的 FSDP 相比,每个设备的峰值内存使用量有所减小,从约 75 MB 降至 66 MB。

使用 Auto_wrap policy 的 FSDP 峰值内存使用情况#
CPU 卸载:如果模型非常大,即使使用 FSDP 也无法容纳到 GPU 中,那么 CPU 卸载会很有帮助。
目前只支持参数和梯度 CPU 卸载。可以通过传递 cpu_offload=CPUOffload(offload_params=True) 来启用。
请注意,这目前隐式启用了到 CPU 的梯度卸载,以便参数和梯度位于同一设备上以便与优化器一起使用。此 API 可能会更改。默认值为 None,在这种情况下将不会卸载。
使用此功能可能会导致训练速度显着变慢,因为张量需要在主机和设备之间频繁复制,但它可以帮助提高内存效率并训练更大规模的模型。
在 2.4 中,我们将其添加到 FSDP 包装器中
model = FSDP(model,
auto_wrap_policy=my_auto_wrap_policy,
cpu_offload=CPUOffload(offload_params=True))
与 DDP 相比,如果在 2.4 中我们只是正常地将模型包装在 DPP 中,并将更改保存在“DDP_mnist.py”中。
model = Net().to(rank)
model = DDP(model)
python DDP_mnist.py
CUDA event elapsed time on training loop 39.77766015625sec
以下是 DDP MNIST 训练在 g4dn.12.xlarge AWS EC2 实例上(使用 4 个 GPU)的峰值内存使用情况,通过 PyTorch profiler 捕获。

使用 Auto_wrap policy 的 DDP 峰值内存使用情况#
考虑到我们在这里定义的玩具示例和微小的 MNIST 模型,我们可以观察到 DDP 和 FSDP 之间峰值内存使用量的差异。在 DDP 中,每个进程都持有模型的副本,因此内存占用比 FSDP 高,FSDP 将模型参数、优化器状态和梯度分片到 DDP 进程中。使用带有 auto_wrap policy 的 FSDP 的峰值内存使用量最低,其次是 FSDP 和 DDP。
此外,在查看时间方面,考虑到小模型和在单台机器上运行训练,带或不带 auto_wrap policy 的 FSDP 的性能几乎与 DDP 一样快。此示例不能代表大多数实际应用,有关 DDP 和 FSDP 之间详细的分析和比较,请参阅此 博客文章 。
