


注意
跳转到末尾 下载完整的示例代码。
循环 DQN:训练循环策略#
创建时间:2023 年 11 月 8 日 | 最后更新:2025 年 1 月 27 日 | 最后验证:未经验证
如何在 TorchRL 中将 RNN 整合到 actor 中
如何将基于记忆的策略与回放缓冲区和损失模块一起使用
PyTorch v2.0.0
gym[mujoco]
tqdm
概述#
基于记忆的策略不仅在观测部分可观测时至关重要,而且在需要考虑时间维度以做出明智决策时也是如此。
循环神经网络长期以来一直是基于记忆的策略的流行工具。其思想是在两个连续步骤之间在内存中保留一个循环状态,并将其作为策略的输入,与当前观测一起使用。
本教程展示了如何使用 TorchRL 将 RNN 整合到策略中。
主要学习内容
在 TorchRL 中将 RNN 整合到 actor 中;
将这个基于记忆的策略与回放缓冲区和损失模块一起使用。
在 TorchRL 中使用 RNN 的核心思想是使用 TensorDict 作为数据载体,在不同步骤之间传递隐藏状态。我们将构建一个策略,该策略从当前的 TensorDict 中读取前一个循环状态,并将当前的循环状态写入下一个状态的 TensorDict 中。
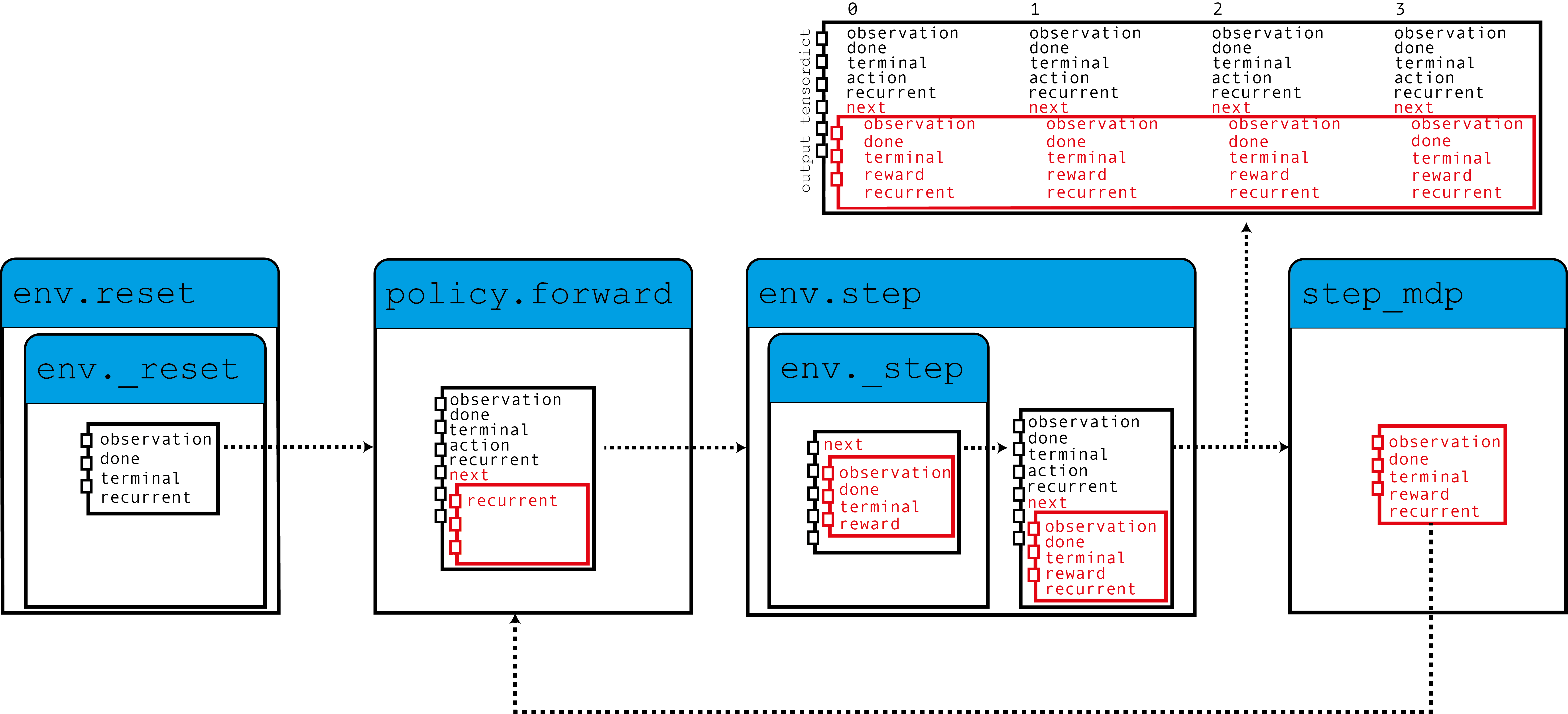
正如该图所示,我们的环境使用零初始化的循环状态填充 TensorDict,策略会与观测一起读取这些状态以产生动作,并使用循环状态用于下一步。当调用 step_mdp() 函数时,下一个状态的循环状态会被带到当前的 TensorDict 中。让我们看看这在实践中是如何实现的。
如果您在 Google Colab 中运行此代码,请确保安装以下依赖项
!pip3 install torchrl
!pip3 install gym[mujoco]
!pip3 install tqdm
设置#
import torch
import tqdm
from tensordict.nn import TensorDictModule as Mod, TensorDictSequential as Seq
from torch import nn
from torchrl.collectors import SyncDataCollector
from torchrl.data import LazyMemmapStorage, TensorDictReplayBuffer
from torchrl.envs import (
Compose,
ExplorationType,
GrayScale,
InitTracker,
ObservationNorm,
Resize,
RewardScaling,
set_exploration_type,
StepCounter,
ToTensorImage,
TransformedEnv,
)
from torchrl.envs.libs.gym import GymEnv
from torchrl.modules import ConvNet, EGreedyModule, LSTMModule, MLP, QValueModule
from torchrl.objectives import DQNLoss, SoftUpdate
is_fork = multiprocessing.get_start_method() == "fork"
device = (
torch.device(0)
if torch.cuda.is_available() and not is_fork
else torch.device("cpu")
)
环境#
与往常一样,第一步是构建我们的环境:它帮助我们定义问题并相应地构建策略网络。在本教程中,我们将运行一个基于像素的 CartPole gym 环境的实例,并进行一些自定义转换:转换为灰度、调整大小到 84x84、缩减奖励并归一化观测。
注意
StepCounter 转换是辅助性的。由于 CartPole 任务的目标是使轨迹尽可能长,因此计算步数有助于我们跟踪策略的性能。
对于本教程的目的,有两个转换很重要
InitTracker将通过在 TensorDict 中添加一个"is_init"布尔掩码来标记reset()的调用,该掩码将跟踪哪些步骤需要重置 RNN 隐藏状态。TensorDictPrimer转换稍微技术性一些。它不是使用 RNN 策略所必需的。但是,它会指示环境(以及后续的收集器)某些额外的键是可预期的。添加后,调用 env.reset() 将使用零初始化的张量填充指定的条目。由于策略需要这些张量,收集器会在收集期间将它们传递。最终,我们将把隐藏状态存储在回放缓冲区中,这将有助于我们启动损失模块中的 RNN 操作的计算(否则这些操作将以 0 初始化)。总而言之:不包含此转换不会对策略的训练产生巨大影响,但它会使循环键从收集到的数据和回放缓冲区中消失,这反过来会导致训练稍微不那么理想。幸运的是,我们提供的LSTMModule配备了一个辅助方法来帮助我们构建这个转换,所以我们可以等到构建它时再处理!
env = TransformedEnv(
GymEnv("CartPole-v1", from_pixels=True, device=device),
Compose(
ToTensorImage(),
GrayScale(),
Resize(84, 84),
StepCounter(),
InitTracker(),
RewardScaling(loc=0.0, scale=0.1),
ObservationNorm(standard_normal=True, in_keys=["pixels"]),
),
)
像往常一样,我们需要手动初始化我们的归一化常数
env.transform[-1].init_stats(1000, reduce_dim=[0, 1, 2], cat_dim=0, keep_dims=[0])
td = env.reset()
策略#
我们的策略将包含 3 个组件:一个 ConvNet 主干,一个 LSTMModule 记忆层和一个浅层 MLP 块,它将 LSTM 输出映射到动作值。
卷积网络#
我们构建了一个卷积网络,并辅以 torch.nn.AdaptiveAvgPool2d,它会将输出压缩成一个大小为 64 的向量。 ConvNet 可以帮助我们实现这一点
feature = Mod(
ConvNet(
num_cells=[32, 32, 64],
squeeze_output=True,
aggregator_class=nn.AdaptiveAvgPool2d,
aggregator_kwargs={"output_size": (1, 1)},
device=device,
),
in_keys=["pixels"],
out_keys=["embed"],
)
我们在一批数据上执行第一个模块,以收集输出向量的大小
n_cells = feature(env.reset())["embed"].shape[-1]
LSTM 模块#
TorchRL 提供了一个专门的 LSTMModule 类来将 LSTM 整合到您的代码库中。它是一个 TensorDictModuleBase 的子类:因此,它有一组 in_keys 和 out_keys,它们指示在模块执行期间应该预期读取和写入/更新的值。该类带有这些属性的可自定义预定义值,以方便其构建。
注意
使用限制:该类支持几乎所有 LSTM 功能,如 dropout 或多层 LSTM。然而,为了遵守 TorchRL 的约定,此 LSTM 必须将 batch_first 属性设置为 True,这在 PyTorch 中**不是**默认设置。但是,我们的 LSTMModule 改变了这种默认行为,所以我们可以通过原生调用来处理。
此外,LSTM 不能将 bidirectional 属性设置为 True,因为这在在线环境中是不可用的。在这种情况下,默认值是正确的。
lstm = LSTMModule(
input_size=n_cells,
hidden_size=128,
device=device,
in_key="embed",
out_key="embed",
)
让我们看看 LSTM 模块类,特别是它的 in 和 out_keys
print("in_keys", lstm.in_keys)
print("out_keys", lstm.out_keys)
我们可以看到,这些值包含我们指定为 in_key(和 out_key)的键以及循环键名称。out_keys 前面有一个“next”前缀,表明它们需要在“next” TensorDict 中写入。我们使用这种约定(可以通过传递 in_keys/out_keys 参数来覆盖)来确保调用 step_mdp() 会将循环状态移到根 TensorDict,使其在下一次调用时可供 RNN 使用(参见引言中的图)。
如前所述,我们还需要向环境添加一个可选转换,以确保循环状态被传递到缓冲区。 make_tensordict_primer() 方法正是为此目的而设计的。
env.append_transform(lstm.make_tensordict_primer())
就是这样!现在我们可以打印环境,检查在添加 primer 后一切是否正常。
print(env)
MLP#
我们使用单层 MLP 来表示我们将用于策略的动作值。
mlp = MLP(
out_features=2,
num_cells=[
64,
],
device=device,
)
并将偏置填充为零
mlp[-1].bias.data.fill_(0.0)
mlp = Mod(mlp, in_keys=["embed"], out_keys=["action_value"])
使用 Q 值选择动作#
我们的策略的最后一部分是 Q 值模块。Q 值模块 QValueModule 将读取我们 MLP 生成的 "action_values" 键,并从中收集具有最大值的动作。我们唯一需要做的是指定动作空间,这可以通过传递字符串或动作规范来完成。这允许我们使用分类(有时称为“稀疏”)编码或其 one-hot 版本。
qval = QValueModule(spec=env.action_spec)
注意
TorchRL 还提供了一个包装器类 torchrl.modules.QValueActor,它将一个模块包装在 Sequential 中,并附带一个 QValueModule,就像我们在这里显式做的那样。这样做的好处很小,而且过程不太透明,但最终结果将与我们这里所做的相似。
我们现在可以将它们组合到一个 TensorDictSequential 中
stoch_policy = Seq(feature, lstm, mlp, qval)
DQN 是一个确定性算法,探索是其关键部分。我们将使用一个 \(\epsilon\)-greedy 策略,初始 epsilon 为 0.2,并逐渐衰减到 0。通过调用 step()(见下文的训练循环)来实现这种衰减。
exploration_module = EGreedyModule(
annealing_num_steps=1_000_000, spec=env.action_spec, eps_init=0.2
)
stoch_policy = Seq(
stoch_policy,
exploration_module,
)
将模型用于损失#
我们构建的模型非常适合在顺序设置中使用。然而,torch.nn.LSTM 类可以使用 cuDNN 优化的后端在 GPU 设备上更快地运行 RNN 序列。我们不想错过这样一次加速训练循环的机会!要使用它,我们只需要在损失中使用 LSTM 模块时告诉它以“recurrent-mode”运行。由于我们通常会想要两个 LSTM 模块的副本,因此我们通过调用 set_recurrent_mode() 方法来实现这一点,该方法将返回一个 LSTM 的新实例(具有共享权重),该实例会假设输入数据是顺序的。
policy = Seq(feature, lstm.set_recurrent_mode(True), mlp, qval)
由于我们还有一些未初始化的参数,因此在创建优化器等之前应该先初始化它们。
policy(env.reset())
DQN 损失#
我们的 DQN 损失要求我们传递策略,再次是动作空间。虽然这可能看起来多余,但它很重要,因为我们希望确保 DQNLoss 和 QValueModule 类是兼容的,但它们之间没有强依赖关系。
为了使用 Double-DQN,我们请求一个 delay_value 参数,它将创建一个网络参数的非可微分副本,用作目标网络。
loss_fn = DQNLoss(policy, action_space=env.action_spec, delay_value=True)
由于我们正在使用 Double DQN,因此我们需要更新目标参数。我们将使用 SoftUpdate 实例来完成此工作。
updater = SoftUpdate(loss_fn, eps=0.95)
optim = torch.optim.Adam(policy.parameters(), lr=3e-4)
收集器和回放缓冲区#
我们构建了最简单的数据收集器。我们将尝试训练我们的算法一百万帧,每次将缓冲区扩展 50 帧。缓冲区将设计用于存储 20,000 条长为 50 步的轨迹。在每次优化步骤(每次数据收集 16 次)中,我们将从缓冲区收集 4 个项目,总共 200 个转换。我们将使用 LazyMemmapStorage 存储将数据保留在磁盘上。
注意
为了效率,我们这里只运行了几千次迭代。在实际设置中,总帧数应设置为 1M。
collector = SyncDataCollector(env, stoch_policy, frames_per_batch=50, total_frames=200, device=device)
rb = TensorDictReplayBuffer(
storage=LazyMemmapStorage(20_000), batch_size=4, prefetch=10
)
训练循环#
为了跟踪进度,我们将在每 50 次数据收集后在环境中运行一次策略,并在训练后绘制结果。
utd = 16
pbar = tqdm.tqdm(total=1_000_000)
longest = 0
traj_lens = []
for i, data in enumerate(collector):
if i == 0:
print(
"Let us print the first batch of data.\nPay attention to the key names "
"which will reflect what can be found in this data structure, in particular: "
"the output of the QValueModule (action_values, action and chosen_action_value),"
"the 'is_init' key that will tell us if a step is initial or not, and the "
"recurrent_state keys.\n",
data,
)
pbar.update(data.numel())
# it is important to pass data that is not flattened
rb.extend(data.unsqueeze(0).to_tensordict().cpu())
for _ in range(utd):
s = rb.sample().to(device, non_blocking=True)
loss_vals = loss_fn(s)
loss_vals["loss"].backward()
optim.step()
optim.zero_grad()
longest = max(longest, data["step_count"].max().item())
pbar.set_description(
f"steps: {longest}, loss_val: {loss_vals['loss'].item(): 4.4f}, action_spread: {data['action'].sum(0)}"
)
exploration_module.step(data.numel())
updater.step()
with set_exploration_type(ExplorationType.DETERMINISTIC), torch.no_grad():
rollout = env.rollout(10000, stoch_policy)
traj_lens.append(rollout.get(("next", "step_count")).max().item())
让我们绘制我们的结果
if traj_lens:
from matplotlib import pyplot as plt
plt.plot(traj_lens)
plt.xlabel("Test collection")
plt.title("Test trajectory lengths")
结论#
我们已经了解了如何在 TorchRL 中将 RNN 整合到策略中。您现在应该能够
创建一个充当
TensorDictModule的 LSTM 模块通过
InitTracker转换指示 LSTM 模块需要重置将此模块整合到策略和损失模块中
确保收集器了解循环状态条目,以便它们可以与数据的其余部分一起存储在回放缓冲区中
进一步阅读#
TorchRL 文档可以在 这里 找到。
