


注意
跳转到末尾 下载完整的示例代码。
PyTorch 中 non_blocking 和 pin_memory() 的正确使用指南#
创建于: 2024年7月31日 | 最后更新: 2025年3月18日 | 最后验证: 2024年11月5日
简介#
在许多 PyTorch 应用中,将数据从 CPU 传输到 GPU 是至关重要的。用户理解用于在设备之间移动数据的最有效工具和选项至关重要。本教程将探讨 PyTorch 中设备到设备数据传输的两个关键方法:pin_memory() 和带有 non_blocking=True 选项的 to()。
你将学到什么#
通过异步传输和内存固定可以优化张量从 CPU 到 GPU 的传输。然而,有一些重要的注意事项
使用
tensor.pin_memory().to(device, non_blocking=True)可能比直接使用tensor.to(device)慢两倍。通常,
tensor.to(device, non_blocking=True)是提高传输速度的有效选择。虽然
cpu_tensor.to("cuda", non_blocking=True).mean()可以正确执行,但尝试cuda_tensor.to("cpu", non_blocking=True).mean()会导致输出错误。
前言#
本教程中报告的性能取决于用于构建教程的系统。虽然结论适用于不同系统,但具体观察结果可能因可用硬件而略有不同,尤其是在旧硬件上。本教程的主要目标是提供一个理论框架来理解 CPU 到 GPU 的数据传输。然而,任何设计决策都应针对个别情况进行调整,并以基准测试的吞吐量测量以及手头任务的具体要求为指导。
import torch
assert torch.cuda.is_available(), "A cuda device is required to run this tutorial"
本教程需要安装 tensordict。如果你的环境中还没有 tensordict,请在单独的单元格中运行以下命令进行安装
# Install tensordict with the following command
!pip3 install tensordict
我们首先概述这些概念的理论,然后进行具体的功能测试示例。
背景#
内存管理基础#
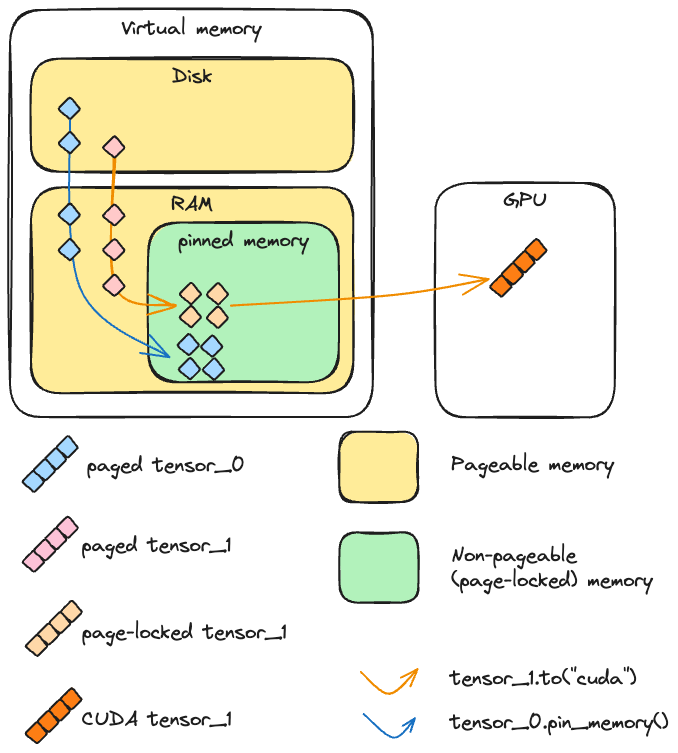
当在 PyTorch 中创建一个 CPU 张量时,该张量的内容需要放置在内存中。这里我们谈论的内存是一个相当复杂的概念,值得仔细研究。我们区分由内存管理单元处理的两种类型的内存:RAM(为简化起见)和磁盘上的交换空间(可能是硬盘驱动器,也可能不是)。磁盘和 RAM(物理内存)中的可用空间共同构成了虚拟内存,这是可用总资源的抽象。简而言之,虚拟内存使得可用空间比单独的 RAM 要大,并产生了主内存比实际更大的幻觉。
在正常情况下,常规 CPU 张量是可分页的,这意味着它被分成称为页的块,这些块可以位于虚拟内存中的任何位置(RAM 或磁盘)。如前所述,这样做的好处是内存看起来比实际主内存要大。
通常,当程序访问不在 RAM 中的页面时,会发生“页面错误”,然后操作系统(OS)会将该页面带回到 RAM(“交换入”或“页面入”)。反过来,操作系统可能需要将另一页“交换出去”(或“页面出去”),以便为新页面腾出空间。
与可分页内存相反,固定内存(或页面锁定内存或不可分页内存)是一种不能被交换到磁盘的内存类型。它允许更快、更可预测的访问时间,但缺点是它比可分页内存(又名主内存)更有限。
CUDA 和(非)可分页内存#
为了理解 CUDA 如何将张量从 CPU 复制到 CUDA,我们来考虑以上两种情况
如果内存是页面锁定的,设备可以直接访问主内存中的内存。内存地址定义明确,需要读取这些数据的函数可以显著加速。
如果内存是可分页的,所有页面都必须先放入主内存,然后才能发送到 GPU。此操作可能需要时间,并且不如在页面锁定张量上执行时那样可预测。
更具体地说,当 CUDA 将可分页数据从 CPU 发送到 GPU 时,它必须先创建该数据的页面锁定副本,然后再进行传输。
使用 non_blocking=True 的异步与同步操作(CUDA cudaMemcpyAsync)#
在执行从主机(例如 CPU)到设备(例如 GPU)的复制时,CUDA 工具包提供了同步或异步相对于主机的操作模式。
实际上,当调用 to() 时,PyTorch 总是调用 cudaMemcpyAsync。如果 non_blocking=False(默认),在每次 cudaMemcpyAsync 之后都会调用 cudaStreamSynchronize,使得调用 to() 在主线程中是阻塞的。如果 non_blocking=True,则不会触发同步,并且主机上的主线程不会被阻塞。因此,从主机的角度来看,可以同时发送多个张量到设备,因为线程不必等待一个传输完成才能开始另一个。
注意
通常,传输在设备端是阻塞的(即使在主机端不是):复制在设备上不能在执行另一个操作时进行。但是,在某些高级场景中,可以在 GPU 端同时进行复制和内核执行。如下面的示例所示,要实现这一点,必须满足三个要求
设备必须至少有一个免费的 DMA(直接内存访问)引擎。现代 GPU 架构,如 Volterra、Tesla 或 H100 设备,拥有多个 DMA 引擎。
传输必须在一个独立的、非默认的 CUDA 流上进行。在 PyTorch 中,可以使用
Stream来处理 CUDA 流。源数据必须在固定内存中。
我们通过在以下脚本上运行配置文件来演示这一点。
import contextlib
from torch.cuda import Stream
s = Stream()
torch.manual_seed(42)
t1_cpu_pinned = torch.randn(1024**2 * 5, pin_memory=True)
t2_cpu_paged = torch.randn(1024**2 * 5, pin_memory=False)
t3_cuda = torch.randn(1024**2 * 5, device="cuda:0")
assert torch.cuda.is_available()
device = torch.device("cuda", torch.cuda.current_device())
# The function we want to profile
def inner(pinned: bool, streamed: bool):
with torch.cuda.stream(s) if streamed else contextlib.nullcontext():
if pinned:
t1_cuda = t1_cpu_pinned.to(device, non_blocking=True)
else:
t2_cuda = t2_cpu_paged.to(device, non_blocking=True)
t_star_cuda_h2d_event = s.record_event()
# This operation can be executed during the CPU to GPU copy if and only if the tensor is pinned and the copy is
# done in the other stream
t3_cuda_mul = t3_cuda * t3_cuda * t3_cuda
t3_cuda_h2d_event = torch.cuda.current_stream().record_event()
t_star_cuda_h2d_event.synchronize()
t3_cuda_h2d_event.synchronize()
# Our profiler: profiles the `inner` function and stores the results in a .json file
def benchmark_with_profiler(
pinned,
streamed,
) -> None:
torch._C._profiler._set_cuda_sync_enabled_val(True)
wait, warmup, active = 1, 1, 2
num_steps = wait + warmup + active
rank = 0
with torch.profiler.profile(
activities=[
torch.profiler.ProfilerActivity.CPU,
torch.profiler.ProfilerActivity.CUDA,
],
schedule=torch.profiler.schedule(
wait=wait, warmup=warmup, active=active, repeat=1, skip_first=1
),
) as prof:
for step_idx in range(1, num_steps + 1):
inner(streamed=streamed, pinned=pinned)
if rank is None or rank == 0:
prof.step()
prof.export_chrome_trace(f"trace_streamed{int(streamed)}_pinned{int(pinned)}.json")
在 Chrome 中加载这些配置文件跟踪(chrome://tracing)会显示以下结果:首先,让我们看看在主流中将可分页张量发送到 GPU 之后,t3_cuda 上的算术运算是如何执行的
benchmark_with_profiler(streamed=False, pinned=False)

使用固定内存张量对跟踪的改变不大,两个操作仍然是连续执行的
benchmark_with_profiler(streamed=False, pinned=True)

在单独的流上将可分页张量发送到 GPU 也是一个阻塞操作
benchmark_with_profiler(streamed=True, pinned=False)

只有固定张量以独立流的形式复制到 GPU 时,才能与其他在主流上执行的 CUDA 内核重叠
benchmark_with_profiler(streamed=True, pinned=True)

PyTorch 的视角#
pin_memory()#
PyTorch 通过 pin_memory() 方法和构造函数参数提供了创建张量并将其发送到页面锁定内存的可能性。在 CUDA 已初始化的机器上,可以通过 pin_memory() 方法将 CPU 张量转换为固定内存。重要的是,pin_memory 在主机的宿主线程上是阻塞的:它会等待张量复制到页面锁定内存后才执行下一个操作。新张量可以直接在固定内存中创建,使用 zeros()、ones() 和其他构造函数。
让我们检查固定内存和将张量发送到 CUDA 的速度
import torch
import gc
from torch.utils.benchmark import Timer
import matplotlib.pyplot as plt
def timer(cmd):
median = (
Timer(cmd, globals=globals())
.adaptive_autorange(min_run_time=1.0, max_run_time=20.0)
.median
* 1000
)
print(f"{cmd}: {median: 4.4f} ms")
return median
# A tensor in pageable memory
pageable_tensor = torch.randn(1_000_000)
# A tensor in page-locked (pinned) memory
pinned_tensor = torch.randn(1_000_000, pin_memory=True)
# Runtimes:
pageable_to_device = timer("pageable_tensor.to('cuda:0')")
pinned_to_device = timer("pinned_tensor.to('cuda:0')")
pin_mem = timer("pageable_tensor.pin_memory()")
pin_mem_to_device = timer("pageable_tensor.pin_memory().to('cuda:0')")
# Ratios:
r1 = pinned_to_device / pageable_to_device
r2 = pin_mem_to_device / pageable_to_device
# Create a figure with the results
fig, ax = plt.subplots()
xlabels = [0, 1, 2]
bar_labels = [
"pageable_tensor.to(device) (1x)",
f"pinned_tensor.to(device) ({r1:4.2f}x)",
f"pageable_tensor.pin_memory().to(device) ({r2:4.2f}x)"
f"\npin_memory()={100*pin_mem/pin_mem_to_device:.2f}% of runtime.",
]
values = [pageable_to_device, pinned_to_device, pin_mem_to_device]
colors = ["tab:blue", "tab:red", "tab:orange"]
ax.bar(xlabels, values, label=bar_labels, color=colors)
ax.set_ylabel("Runtime (ms)")
ax.set_title("Device casting runtime (pin-memory)")
ax.set_xticks([])
ax.legend()
plt.show()
# Clear tensors
del pageable_tensor, pinned_tensor
_ = gc.collect()
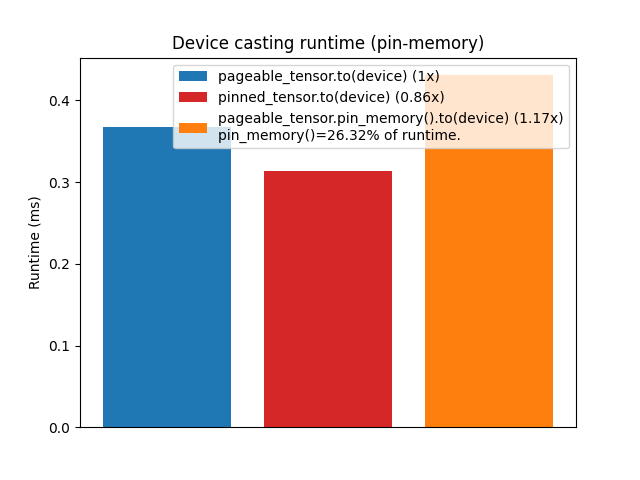
pageable_tensor.to('cuda:0'): 0.3698 ms
pinned_tensor.to('cuda:0'): 0.3148 ms
pageable_tensor.pin_memory(): 0.1193 ms
pageable_tensor.pin_memory().to('cuda:0'): 0.4369 ms
我们可以观察到,将固定内存张量转换为 GPU 确实比可分页张量快得多,因为在底层,可分页张量在发送到 GPU 之前必须复制到固定内存。
然而,与普遍的看法相反,在将可分页张量转换为 GPU 之前调用 pin_memory() 不应带来任何显著的速度提升,相反,此调用通常比仅执行传输慢。这是有道理的,因为我们实际上是在要求 Python 执行 CUDA 实际上会执行的操作,然后再将数据从主机复制到设备。
注意
pin_memory 的 PyTorch 实现依赖于通过 cudaHostAlloc 创建固定内存中的全新存储,在极少数情况下,可能比 cudaMemcpy 分块传输数据更快。同样,观察结果可能因可用硬件、发送的张量大小或可用 RAM 量而异。
non_blocking=True#
如前所述,许多 PyTorch 操作都可以通过 non_blocking 参数以相对于主机的异步方式执行。
在这里,为了准确评估使用 non_blocking 的好处,我们将设计一个稍微复杂的实验,因为我们想评估在调用 non_blocking 和不调用 non_blocking 的情况下,将多个张量发送到 GPU 的速度。
# A simple loop that copies all tensors to cuda
def copy_to_device(*tensors):
result = []
for tensor in tensors:
result.append(tensor.to("cuda:0"))
return result
# A loop that copies all tensors to cuda asynchronously
def copy_to_device_nonblocking(*tensors):
result = []
for tensor in tensors:
result.append(tensor.to("cuda:0", non_blocking=True))
# We need to synchronize
torch.cuda.synchronize()
return result
# Create a list of tensors
tensors = [torch.randn(1000) for _ in range(1000)]
to_device = timer("copy_to_device(*tensors)")
to_device_nonblocking = timer("copy_to_device_nonblocking(*tensors)")
# Ratio
r1 = to_device_nonblocking / to_device
# Plot the results
fig, ax = plt.subplots()
xlabels = [0, 1]
bar_labels = [f"to(device) (1x)", f"to(device, non_blocking=True) ({r1:4.2f}x)"]
colors = ["tab:blue", "tab:red"]
values = [to_device, to_device_nonblocking]
ax.bar(xlabels, values, label=bar_labels, color=colors)
ax.set_ylabel("Runtime (ms)")
ax.set_title("Device casting runtime (non-blocking)")
ax.set_xticks([])
ax.legend()
plt.show()
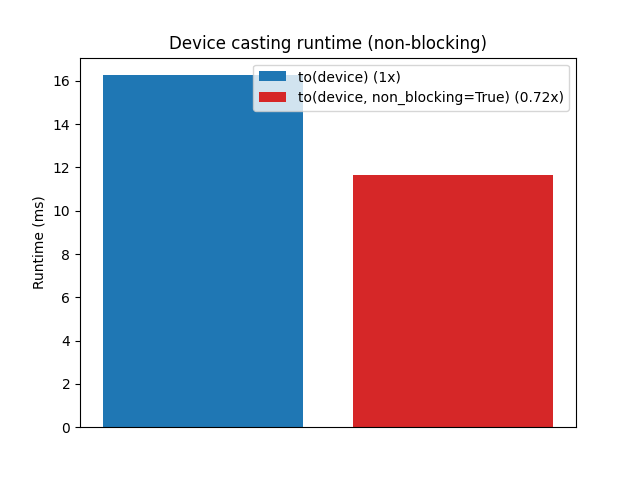
copy_to_device(*tensors): 16.9939 ms
copy_to_device_nonblocking(*tensors): 12.1922 ms
为了更好地理解这里发生的情况,让我们分析这两个函数
from torch.profiler import profile, ProfilerActivity
def profile_mem(cmd):
with profile(activities=[ProfilerActivity.CPU]) as prof:
exec(cmd)
print(cmd)
print(prof.key_averages().table(row_limit=10))
让我们先看看常规 to(device) 的调用堆栈
print("Call to `to(device)`", profile_mem("copy_to_device(*tensors)"))
copy_to_device(*tensors)
------------------------- ------------ ------------ ------------ ------------ ------------ ------------
Name Self CPU % Self CPU CPU total % CPU total CPU time avg # of Calls
------------------------- ------------ ------------ ------------ ------------ ------------ ------------
aten::to 5.74% 1.263ms 100.00% 21.999ms 21.999us 1000
aten::_to_copy 12.20% 2.685ms 94.26% 20.736ms 20.736us 1000
aten::empty_strided 20.50% 4.510ms 20.50% 4.510ms 4.510us 1000
aten::copy_ 21.80% 4.797ms 61.56% 13.542ms 13.542us 1000
cudaMemcpyAsync 16.87% 3.710ms 16.87% 3.710ms 3.710us 1000
cudaStreamSynchronize 22.88% 5.034ms 22.88% 5.034ms 5.034us 1000
------------------------- ------------ ------------ ------------ ------------ ------------ ------------
Self CPU time total: 21.999ms
Call to `to(device)` None
现在是 non_blocking 版本
print(
"Call to `to(device, non_blocking=True)`",
profile_mem("copy_to_device_nonblocking(*tensors)"),
)
copy_to_device_nonblocking(*tensors)
------------------------- ------------ ------------ ------------ ------------ ------------ ------------
Name Self CPU % Self CPU CPU total % CPU total CPU time avg # of Calls
------------------------- ------------ ------------ ------------ ------------ ------------ ------------
aten::to 7.25% 1.268ms 99.86% 17.457ms 17.457us 1000
aten::_to_copy 15.64% 2.734ms 92.61% 16.189ms 16.189us 1000
aten::empty_strided 25.92% 4.531ms 25.92% 4.531ms 4.531us 1000
aten::copy_ 29.83% 5.216ms 51.05% 8.924ms 8.924us 1000
cudaMemcpyAsync 21.21% 3.708ms 21.21% 3.708ms 3.708us 1000
cudaDeviceSynchronize 0.14% 24.411us 0.14% 24.411us 24.411us 1
------------------------- ------------ ------------ ------------ ------------ ------------ ------------
Self CPU time total: 17.482ms
Call to `to(device, non_blocking=True)` None
使用 non_blocking=True 时,结果无疑更好,因为所有传输都在主机端同时启动,并且只进行一次同步。
收益将取决于张量的数量和大小,以及所使用的硬件。
注意
有趣的是,阻塞的 to("cuda") 实际上执行了与 non_blocking=True 相同的异步设备转换操作(cudaMemcpyAsync),只是每次复制后都进行了同步点。
协同作用#
现在我们已经明确了,将已经固定在内存中的张量传输到 GPU 比从可分页内存传输更快,并且我们知道异步执行这些传输也比同步执行更快,我们可以对这些方法的组合进行基准测试。首先,让我们编写几个新函数来对每个张量调用 pin_memory 和 to(device)
def pin_copy_to_device(*tensors):
result = []
for tensor in tensors:
result.append(tensor.pin_memory().to("cuda:0"))
return result
def pin_copy_to_device_nonblocking(*tensors):
result = []
for tensor in tensors:
result.append(tensor.pin_memory().to("cuda:0", non_blocking=True))
# We need to synchronize
torch.cuda.synchronize()
return result
使用 pin_memory() 的好处在相对较大的批量和较大的张量上更为明显
tensors = [torch.randn(1_000_000) for _ in range(1000)]
page_copy = timer("copy_to_device(*tensors)")
page_copy_nb = timer("copy_to_device_nonblocking(*tensors)")
tensors_pinned = [torch.randn(1_000_000, pin_memory=True) for _ in range(1000)]
pinned_copy = timer("copy_to_device(*tensors_pinned)")
pinned_copy_nb = timer("copy_to_device_nonblocking(*tensors_pinned)")
pin_and_copy = timer("pin_copy_to_device(*tensors)")
pin_and_copy_nb = timer("pin_copy_to_device_nonblocking(*tensors)")
# Plot
strategies = ("pageable copy", "pinned copy", "pin and copy")
blocking = {
"blocking": [page_copy, pinned_copy, pin_and_copy],
"non-blocking": [page_copy_nb, pinned_copy_nb, pin_and_copy_nb],
}
x = torch.arange(3)
width = 0.25
multiplier = 0
fig, ax = plt.subplots(layout="constrained")
for attribute, runtimes in blocking.items():
offset = width * multiplier
rects = ax.bar(x + offset, runtimes, width, label=attribute)
ax.bar_label(rects, padding=3, fmt="%.2f")
multiplier += 1
# Add some text for labels, title and custom x-axis tick labels, etc.
ax.set_ylabel("Runtime (ms)")
ax.set_title("Runtime (pin-mem and non-blocking)")
ax.set_xticks([0, 1, 2])
ax.set_xticklabels(strategies)
plt.setp(ax.get_xticklabels(), rotation=45, ha="right", rotation_mode="anchor")
ax.legend(loc="upper left", ncols=3)
plt.show()
del tensors, tensors_pinned
_ = gc.collect()
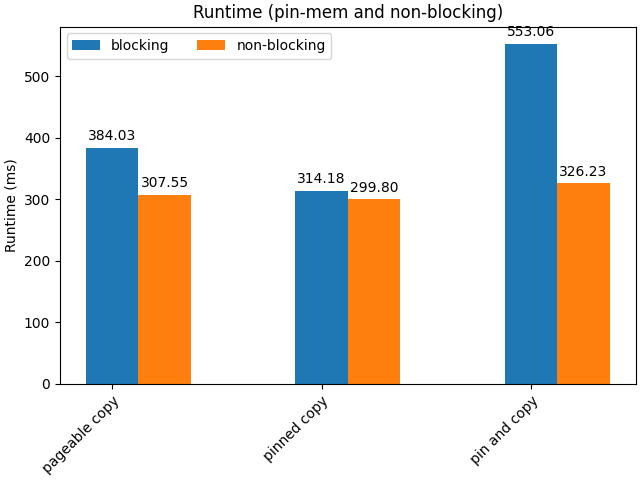
copy_to_device(*tensors): 391.3498 ms
copy_to_device_nonblocking(*tensors): 314.2053 ms
copy_to_device(*tensors_pinned): 315.6334 ms
copy_to_device_nonblocking(*tensors_pinned): 299.7579 ms
pin_copy_to_device(*tensors): 578.2854 ms
pin_copy_to_device_nonblocking(*tensors): 324.2843 ms
其他复制方向(GPU -> CPU,CPU -> MPS)#
到目前为止,我们一直假设从 CPU 到 GPU 的异步复制是安全的。这通常是正确的,因为 CUDA 会自动处理同步,以确保在读取时访问的数据有效 __无论张量是否在可分页 内存中__。
然而,在其他情况下,我们不能做同样的假设:当张量被放置在固定内存中时,在调用主机到设备传输后修改原始副本可能会损坏 GPU 上接收到的数据。类似地,当传输在相反方向进行时,从 GPU 到 CPU,或从任何非 CPU 或 GPU 的设备传输到任何非 CUDA 处理的 GPU(例如 MPS)的设备时,如果没有显式同步,则无法保证 GPU 上读取的数据有效。
在这些情况下,这些传输不保证在数据访问时复制已完成。因此,主机上的数据可能不完整或不正确,有效地使其成为垃圾。
我们首先用固定内存张量来演示这一点
DELAY = 100000000
try:
i = -1
for i in range(100):
# Create a tensor in pin-memory
cpu_tensor = torch.ones(1024, 1024, pin_memory=True)
torch.cuda.synchronize()
# Send the tensor to CUDA
cuda_tensor = cpu_tensor.to("cuda", non_blocking=True)
torch.cuda._sleep(DELAY)
# Corrupt the original tensor
cpu_tensor.zero_()
assert (cuda_tensor == 1).all()
print("No test failed with non_blocking and pinned tensor")
except AssertionError:
print(f"{i}th test failed with non_blocking and pinned tensor. Skipping remaining tests")
1th test failed with non_blocking and pinned tensor. Skipping remaining tests
使用可分页张量始终有效
i = -1
for i in range(100):
# Create a tensor in pageable memory
cpu_tensor = torch.ones(1024, 1024)
torch.cuda.synchronize()
# Send the tensor to CUDA
cuda_tensor = cpu_tensor.to("cuda", non_blocking=True)
torch.cuda._sleep(DELAY)
# Corrupt the original tensor
cpu_tensor.zero_()
assert (cuda_tensor == 1).all()
print("No test failed with non_blocking and pageable tensor")
No test failed with non_blocking and pageable tensor
现在让我们演示一下,没有同步,CUDA 到 CPU 也无法产生可靠的输出
tensor = (
torch.arange(1, 1_000_000, dtype=torch.double, device="cuda")
.expand(100, 999999)
.clone()
)
torch.testing.assert_close(
tensor.mean(), torch.tensor(500_000, dtype=torch.double, device="cuda")
), tensor.mean()
try:
i = -1
for i in range(100):
cpu_tensor = tensor.to("cpu", non_blocking=True)
torch.testing.assert_close(
cpu_tensor.mean(), torch.tensor(500_000, dtype=torch.double)
)
print("No test failed with non_blocking")
except AssertionError:
print(f"{i}th test failed with non_blocking. Skipping remaining tests")
try:
i = -1
for i in range(100):
cpu_tensor = tensor.to("cpu", non_blocking=True)
torch.cuda.synchronize()
torch.testing.assert_close(
cpu_tensor.mean(), torch.tensor(500_000, dtype=torch.double)
)
print("No test failed with synchronize")
except AssertionError:
print(f"One test failed with synchronize: {i}th assertion!")
0th test failed with non_blocking. Skipping remaining tests
No test failed with synchronize
通常,只有当目标是支持 CUDA 的设备且原始张量在可分页内存中时,到设备的异步复制才无需显式同步。
总之,使用 non_blocking=True 复制数据从 CPU 到 GPU 是安全的,但对于任何其他方向,仍然可以使用 non_blocking=True,但用户必须确保在访问数据之前执行了设备同步。
实际建议#
基于我们的观察,我们可以开始总结一些早期建议
总的来说,non_blocking=True 将提供良好的吞吐量,无论原始张量是否在固定内存中。如果张量已经在固定内存中,传输可以加速,但从 Python 主线程手动将其发送到固定内存是主机上的阻塞操作,因此会抵消使用 non_blocking=True 的大部分好处(因为 CUDA 无论如何都会执行 pin_memory 传输)。
现在,人们可能会合理地问 pin_memory() 方法有什么用。在下一节中,我们将进一步探讨如何使用它来进一步加速数据传输。
附加考虑#
PyTorch notoriously 提供了一个 DataLoader 类,其构造函数接受一个 pin_memory 参数。考虑到我们之前关于 pin_memory 的讨论,你可能会想知道 DataLoader 如何设法加速数据传输,如果内存固定是固有阻塞的。
关键在于 DataLoader 使用一个单独的线程来处理从可分页内存到固定内存的数据传输,从而防止主线程中的任何阻塞。
为了说明这一点,我们将使用同名库中的 TensorDict 原语。调用 to() 时,默认行为是异步将张量发送到设备,然后调用一次 torch.device.synchronize()。
此外,TensorDict.to() 包括一个 non_blocking_pin 选项,它启动多个线程来执行 pin_memory(),然后再继续 to(device)。这种方法可以进一步加速数据传输,如下例所示。
from tensordict import TensorDict
import torch
from torch.utils.benchmark import Timer
import matplotlib.pyplot as plt
# Create the dataset
td = TensorDict({str(i): torch.randn(1_000_000) for i in range(1000)})
# Runtimes
copy_blocking = timer("td.to('cuda:0', non_blocking=False)")
copy_non_blocking = timer("td.to('cuda:0')")
copy_pin_nb = timer("td.to('cuda:0', non_blocking_pin=True, num_threads=0)")
copy_pin_multithread_nb = timer("td.to('cuda:0', non_blocking_pin=True, num_threads=4)")
# Rations
r1 = copy_non_blocking / copy_blocking
r2 = copy_pin_nb / copy_blocking
r3 = copy_pin_multithread_nb / copy_blocking
# Figure
fig, ax = plt.subplots()
xlabels = [0, 1, 2, 3]
bar_labels = [
"Blocking copy (1x)",
f"Non-blocking copy ({r1:4.2f}x)",
f"Blocking pin, non-blocking copy ({r2:4.2f}x)",
f"Non-blocking pin, non-blocking copy ({r3:4.2f}x)",
]
values = [copy_blocking, copy_non_blocking, copy_pin_nb, copy_pin_multithread_nb]
colors = ["tab:blue", "tab:red", "tab:orange", "tab:green"]
ax.bar(xlabels, values, label=bar_labels, color=colors)
ax.set_ylabel("Runtime (ms)")
ax.set_title("Device casting runtime")
ax.set_xticks([])
ax.legend()
plt.show()
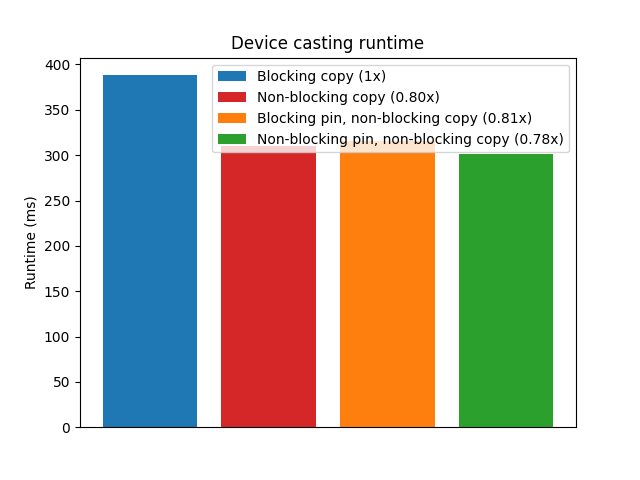
td.to('cuda:0', non_blocking=False): 395.2895 ms
td.to('cuda:0'): 317.1413 ms
td.to('cuda:0', non_blocking_pin=True, num_threads=0): 316.2662 ms
td.to('cuda:0', non_blocking_pin=True, num_threads=4): 301.1578 ms
在这个例子中,我们将许多大型张量从 CPU 传输到 GPU。这种情况非常适合利用多线程 pin_memory(),这可以显著提高性能。但是,如果张量很小,多线程产生的开销可能会超过收益。类似地,如果张量很少,将张量固定在单独线程上的好处也有限。
另外需要注意的是,虽然创建固定内存中的永久缓冲区来在将张量从可分页内存传输到 GPU 之前进行转移似乎有利,但这种策略不一定会加快计算。将数据复制到固定内存所产生的固有瓶颈仍然是一个限制因素。
此外,将驻留在磁盘上的数据(无论是在共享内存还是文件中)传输到 GPU 通常需要一个中间步骤,即将数据复制到固定内存(位于 RAM 中)。在这种情况下,使用 non_blocking 进行大型数据传输可能会显著增加 RAM 消耗,从而可能对系统性能产生不利影响。
实际上,没有一种放之四海而皆准的解决方案。多线程 pin_memory 与 non_blocking 传输结合使用的有效性取决于多种因素,包括特定系统、操作系统、硬件以及正在执行的任务的性质。以下是在尝试加速 CPU 和 GPU 之间数据传输或比较不同场景下的吞吐量时需要检查的因素列表
可用核心数
有多少 CPU 核心可用?系统是否与其他可能争夺资源的用户的进程共享?
核心利用率
CPU 核心是否被其他进程大量使用?应用程序是否在进行数据传输的同时执行其他 CPU 密集型任务?
内存利用率
当前正在使用多少可分页内存和页面锁定内存?是否有足够的可用内存来分配额外的固定内存而不影响系统性能?请记住,没有什么是不需要代价的,例如
pin_memory会消耗 RAM 并可能影响其他任务。CUDA 设备功能
GPU 是否支持多个 DMA 引擎进行并发数据传输?正在使用的 CUDA 设备有哪些具体的功能和限制?
要发送的张量数量
典型操作中有多少个张量被传输?
要发送的张量大小
要传输的张量大小是多少?几个大张量或许多小张量可能不会从相同的传输程序中受益。
系统架构
系统的架构如何影响数据传输速度(例如,总线速度、网络延迟)?
此外,在固定内存中分配大量张量或大小适中的张量可能会占用大量 RAM。这减少了可用于其他关键操作(例如分页)的可用内存,这可能会对算法的整体性能产生负面影响。
结论#
在本教程中,我们探索了影响将张量从主机发送到设备时的传输速度和内存管理的几个关键因素。我们了解到使用 non_blocking=True 通常会加速数据传输,而 pin_memory() 如果实现得当,也可以提高性能。然而,这些技术需要仔细的设计和校准才能有效。
请记住,对代码进行性能分析并密切关注内存消耗对于优化资源使用和实现最佳性能至关重要。
其他资源#
如果您在使用 CUDA 设备时遇到内存复制问题,或者想了解更多关于本教程中讨论的内容,请参阅以下参考资料
脚本总运行时间: (1 分钟 2.950 秒)
