


注意
转到末尾 下载完整的示例代码。
神经网络#
创建于: 2017年3月24日 | 最后更新: 2024年5月6日 | 最后验证: 2024年11月5日
您可以使用 torch.nn 包来构建神经网络。
既然您已经对 autograd 有了初步了解,那么 nn 就依赖于 autograd 来定义模型并进行微分。 nn.Module 包含层,以及一个返回 output 的 forward(input) 方法。
例如,看看这个对数字图像进行分类的网络
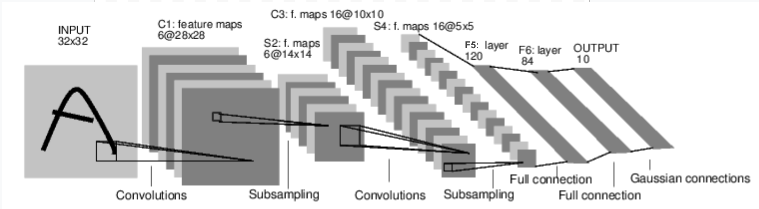
convnet#
这是一个简单的前馈网络。它接收输入,依次通过多个层,然后最终输出结果。
神经网络的典型训练过程如下:
定义一个具有可学习参数(或权重)的神经网络
遍历数据集的输入
通过网络处理输入
计算损失(输出与正确答案的差距有多大)
将梯度反向传播到网络的参数中
更新网络的权重,通常使用简单的更新规则:
weight = weight - learning_rate * gradient
定义网络#
我们来定义这个网络
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 1 input image channel, 6 output channels, 5x5 square convolution
# kernel
self.conv1 = nn.Conv2d(1, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 5 * 5, 120) # 5*5 from image dimension
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, input):
# Convolution layer C1: 1 input image channel, 6 output channels,
# 5x5 square convolution, it uses RELU activation function, and
# outputs a Tensor with size (N, 6, 28, 28), where N is the size of the batch
c1 = F.relu(self.conv1(input))
# Subsampling layer S2: 2x2 grid, purely functional,
# this layer does not have any parameter, and outputs a (N, 6, 14, 14) Tensor
s2 = F.max_pool2d(c1, (2, 2))
# Convolution layer C3: 6 input channels, 16 output channels,
# 5x5 square convolution, it uses RELU activation function, and
# outputs a (N, 16, 10, 10) Tensor
c3 = F.relu(self.conv2(s2))
# Subsampling layer S4: 2x2 grid, purely functional,
# this layer does not have any parameter, and outputs a (N, 16, 5, 5) Tensor
s4 = F.max_pool2d(c3, 2)
# Flatten operation: purely functional, outputs a (N, 400) Tensor
s4 = torch.flatten(s4, 1)
# Fully connected layer F5: (N, 400) Tensor input,
# and outputs a (N, 120) Tensor, it uses RELU activation function
f5 = F.relu(self.fc1(s4))
# Fully connected layer F6: (N, 120) Tensor input,
# and outputs a (N, 84) Tensor, it uses RELU activation function
f6 = F.relu(self.fc2(f5))
# Gaussian layer OUTPUT: (N, 84) Tensor input, and
# outputs a (N, 10) Tensor
output = self.fc3(f6)
return output
net = Net()
print(net)
Net(
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear(in_features=400, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
您只需要定义 forward 函数,而 backward 函数(计算梯度的地方)会通过 autograd 自动为您定义。您可以在 forward 函数中使用任何 Tensor 操作。
模型的可学习参数可以通过 net.parameters() 返回。
params = list(net.parameters())
print(len(params))
print(params[0].size()) # conv1's .weight
10
torch.Size([6, 1, 5, 5])
我们来尝试一个随机的 32x32 输入。注意:该网络(LeNet)的预期输入大小为 32x32。要在此网络上使用 MNIST 数据集,请将数据集中的图像调整为 32x32。
input = torch.randn(1, 1, 32, 32)
out = net(input)
print(out)
tensor([[-0.0022, -0.1108, 0.1433, -0.0090, -0.1501, 0.0117, -0.0448, 0.0890,
0.0395, 0.0250]], grad_fn=<AddmmBackward0>)
清零所有参数的梯度缓冲区,并用随机梯度进行反向传播。
net.zero_grad()
out.backward(torch.randn(1, 10))
注意
torch.nn 只支持 mini-batch。整个 torch.nn 包仅支持 mini-batch 样本的输入,而不支持单个样本。
例如,nn.Conv2d 将接收一个 4D Tensor,格式为 nSamples x nChannels x Height x Width。
如果您只有一个样本,只需使用 input.unsqueeze(0) 添加一个假的批次维度。
在继续之前,让我们回顾一下您到目前为止看到的所有类。
- 回顾
torch.Tensor- 一个支持backward()等自动微分操作的多维数组。它也保存了相对于该 Tensor 的梯度。nn.Module- 神经网络模块。封装参数的便捷方式,并提供将参数移动到 GPU、导出、加载等辅助功能。nn.Parameter- 一种 Tensor,当作为属性分配给Module时,它会被自动注册为参数。autograd.Function- 实现自动微分操作的前向和后向定义。每个Tensor操作至少会创建一个Function节点,该节点连接到创建Tensor的函数,并编码其历史记录。
- 此时,我们已经涵盖了
定义神经网络
处理输入和调用 backward
- 待完成
计算损失
更新网络权重
损失函数#
损失函数接收 (output, target) 对输入,并计算一个值,该值估算输出与目标的差距有多大。
nn 包中包含多种损失函数。一个简单的损失是:nn.MSELoss,它计算输出和目标之间的均方误差。
例如
tensor(0.9673, grad_fn=<MseLossBackward0>)
现在,如果您通过 loss 的 .grad_fn 属性反向传播,您将看到一个如下所示的计算图:
input -> conv2d -> relu -> maxpool2d -> conv2d -> relu -> maxpool2d
-> flatten -> linear -> relu -> linear -> relu -> linear
-> MSELoss
-> loss
因此,当我们调用 loss.backward() 时,整个图将相对于神经网络参数进行微分,并且图中所有 requires_grad=True 的 Tensor 都将通过累积梯度来更新其 .grad Tensor。
为了说明,让我们向后追踪几个步骤。
<MseLossBackward0 object at 0x7fadecb73820>
<AddmmBackward0 object at 0x7fadecb73dc0>
<AccumulateGrad object at 0x7fadecb73100>
反向传播#
要反向传播误差,我们只需要调用 loss.backward()。但是,您需要先清零现有的梯度,否则梯度将累积到现有梯度上。
现在,我们将调用 loss.backward(),并查看 conv1 的偏置梯度在反向传播之前和之后。
net.zero_grad() # zeroes the gradient buffers of all parameters
print('conv1.bias.grad before backward')
print(net.conv1.bias.grad)
loss.backward()
print('conv1.bias.grad after backward')
print(net.conv1.bias.grad)
conv1.bias.grad before backward
None
conv1.bias.grad after backward
tensor([ 0.0273, -0.0096, -0.0059, -0.0020, 0.0224, 0.0143])
现在,我们已经看到了如何使用损失函数。
稍后阅读
神经网络包包含构成深度神经网络构建块的各种模块和损失函数。完整的文档列表在此处:这里。
唯一剩下要学习的是
更新网络权重
更新权重#
实践中最简单的更新规则是随机梯度下降 (SGD)。
weight = weight - learning_rate * gradient
我们可以用简单的 Python 代码来实现这一点。
learning_rate = 0.01
for f in net.parameters():
f.data.sub_(f.grad.data * learning_rate)
然而,当您使用神经网络时,您可能想要使用各种不同的更新规则,如 SGD、Nesterov-SGD、Adam、RMSProp 等。为了实现这一点,我们构建了一个小型包:torch.optim,它实现了所有这些方法。使用起来非常简单。
import torch.optim as optim
# create your optimizer
optimizer = optim.SGD(net.parameters(), lr=0.01)
# in your training loop:
optimizer.zero_grad() # zero the gradient buffers
output = net(input)
loss = criterion(output, target)
loss.backward()
optimizer.step() # Does the update
注意
请注意,梯度缓冲区必须手动清零,使用 optimizer.zero_grad()。这是因为梯度是累积的,如反向传播部分所述。
脚本总运行时间: (0 分钟 0.358 秒)
